简介
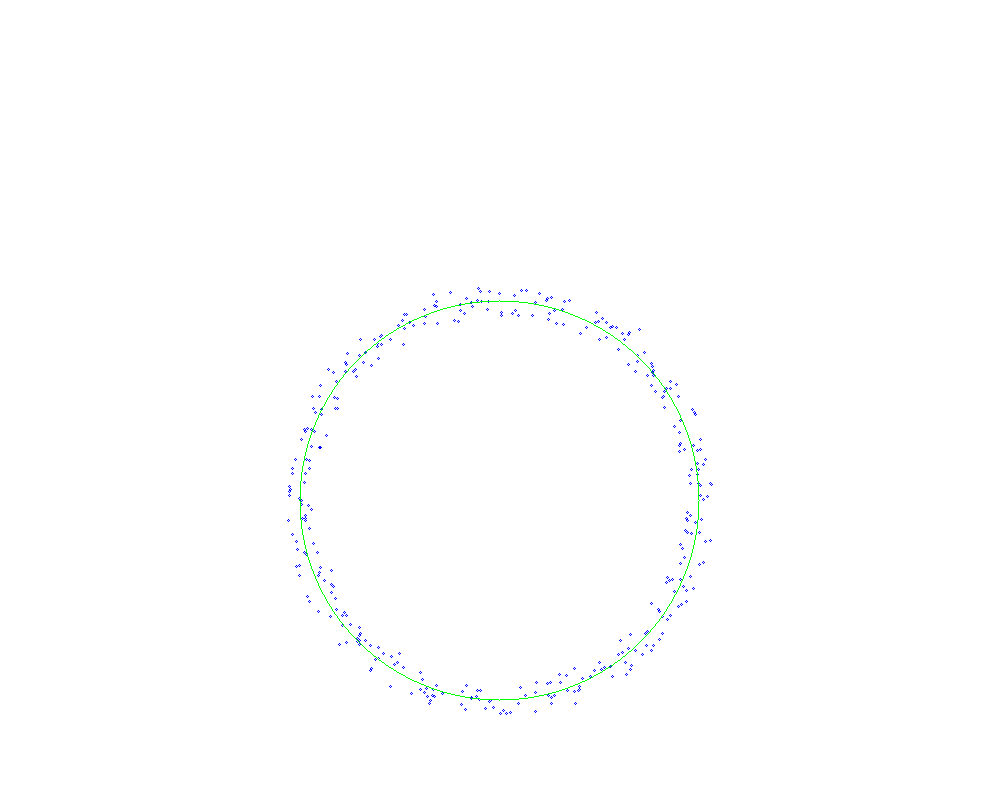
介绍最小二乘法拟合圆的方法,以及公式的推导过程,将求解圆参数的方程组转化为求解矩阵来求解。最后以C++编码实现基于最小二乘法的圆拟合算法。
推导
圆曲线公式
$$R^2 = (x - A)^2 + (y - B)^2$$
$$=> R^2 = x^2 - 2Ax + A^2 + y^2 - 2Bx + B^2$$
令
$$a = -2A$$ $$b = -2B$$ $$c = A^2 + B^2 - R^2$$
则可以得到圆曲线方程的另一个表达形式
$$x^2 + y^2 + ax + by+ c =0$$
如果求出参数$a,b,c$,就确定了圆。圆心半径参数也可以通过以下公式求出
$$A = -\frac{a}{2}$$ $$B = -\frac{b}{2}$$ $$R = \frac{\sqrt{a^2 + b^2 -4c}}{2}$$
现有样本集$(X_i,Y_i) i \epsilon(1,2,3…N)$,点到圆心距离为$d_i$,根据最小二乘法限定误差点到圆心距离减去半径,那么目标函数应为
$$S_{\epsilon^2} = \sum_{i=1}^n(d_i - R)^2 = \sum_{i=1}^n (\sqrt{(X_i - A)^2 + (Y_i - B)^2} - \frac{\sqrt{a^2 + b^2 -4c}}{2})^2$$
而$A = -\frac{a}{2}, B = -\frac{b}{2}$, 代入上式可得
$$S_{\epsilon^2} = \sum_{i=1}^n (\sqrt{X_i^2 + Y_i^2 + aX_i + bY_i + \frac{a^2 + b^2}{4}} - \frac{\sqrt{a^2 + b^2 -4c}}{2})^2 $$
到这一步按理来说应该是求$S_{\epsilon^2}$对$a,b,c$的偏导数,在偏导数为0时可以求得$S_{\epsilon^2}$的极值,上式求偏导涉及到开根号,推导过程极其复杂,而且还没有解析解。所以转而采用近似的目标函数来求解
$$S_{\epsilon^2} = \sum_{i=1}^n(d_i^2 - R^2)^2$$ $$= \sum_{i=1}^n((X_i- A)^2 + (Y_i - B)^2 - \frac{a^2 + b^2 -4c}{4})^2$$ $$= \sum_{i=1}^n(X_i^2 + Y_i^2 + aX_i + bY_i +c)^2$$
下一步求偏导,令偏导为0求取目标函数极值
$$\frac{\partial S_{\epsilon^2}}{\partial a} = \sum_{i=1}^n 2(X_i^2 + Y_i^2 + aX_i + bY_i +c)X_i =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial b} = \sum_{i=1}^n 2(X_i^2 + Y_i^2 + aX_i + bY_i +c)Y_i =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial c} = \sum_{i=1}^n 2(X_i^2 + Y_i^2 + aX_i + bY_i +c) =0$$
$$=>$$
$$\frac{\partial S_{\epsilon^2}}{\partial a} = \sum_{i=1}^n (X_i^2 + Y_i^2 + aX_i + bY_i +c)X_i =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial b} = \sum_{i=1}^n(X_i^2 + Y_i^2 + aX_i + bY_i +c)Y_i =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial c} = \sum_{i=1}^n(X_i^2 + Y_i^2 + aX_i + bY_i +c) =0$$
$$=>$$
$$\frac{\partial S_{\epsilon^2}}{\partial a} = \sum_{i=1}^n (X_i^3 + Y_i^2X_i + aX_i^2 + bX_iY_i +cX_i) =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial b} = \sum_{i=1}^n (X_i^2Y_i + Y_i^3 + aX_iY_i + bY_i^2 +cY_i) =0$$
$$\frac{\partial S_{\epsilon^2}}{\partial c} = \sum_{i=1}^n (X_i^2 + Y_i^2 + aX_i + bY_i +c) =0$$
可得方程组
$$ \sum_{i=1}^n (X_i^3 + Y_i^2X_i) + (\sum_{i=1}^nX_i^2)a + (\sum_{i=1}^nX_iY_i)b + (\sum_{i=1}^nX_i)c =0$$
$$ \sum_{i=1}^n (X_i^2Y_i + Y_i^3) + (\sum_{i=1}^nX_iY_i)a + (\sum_{i=1}^nY_i^2)b +(\sum_{i=1}^nY_i)c =0$$
$$ \sum_{i=1}^n (X_i^2 + Y_i^2) + (\sum_{i=1}^nX_i)a + (\sum_{i=1}^nY_i)b + nc =0$$
即 $$ (\sum_{i=1}^nX_i^2)a + (\sum_{i=1}^nX_iY_i)b + (\sum_{i=1}^nX_i)c = -\sum_{i=1}^n (X_i^3 + Y_i^2X_i) $$
$$ (\sum_{i=1}^nX_iY_i)a + (\sum_{i=1}^nY_i^2)b +(\sum_{i=1}^nY_i)c =-\sum_{i=1}^n (X_i^2Y_i + Y_i^3) $$
$$ (\sum_{i=1}^nX_i)a + (\sum_{i=1}^nY_i)b + nc = -\sum_{i=1}^n (X_i^2 + Y_i^2)$$
用矩阵来表示
$$\begin{bmatrix}\sum_{i=1}^nX_i^2 && \sum_{i=1}^nX_iY_i && \sum_{i=1}^nX_i \\sum_{i=1}^nX_iY_i &&\sum_{i=1}^nY_i^2 &&\sum_{i=1}^nY_i \\sum_{i=1}^nX_i &&\sum_{i=1}^nY_i &&n\end{bmatrix} \begin{bmatrix} a \b \c\end{bmatrix} = \begin{bmatrix} -\sum_{i=1}^n (X_i^3 + Y_i^2X_i) \-\sum_{i=1}^n (X_i^2Y_i + Y_i^3) \-\sum_{i=1}^n (X_i^2 + Y_i^2) \end{bmatrix}$$
通过解矩阵运算即可求出$a,b,c$。
倘若给点集的每个点加上权重,方程组则变为
$$ (\sum_{i=1}^nX_i^2w_i)a + (\sum_{i=1}^nX_iY_iw_i)b + (\sum_{i=1}^nX_iw_i)c = -\sum_{i=1}^n (X_i^3 + Y_i^2X_i)w_i $$
$$ (\sum_{i=1}^nX_iY_iw_i)a + (\sum_{i=1}^nY_i^2w_i)b +(\sum_{i=1}^nY_iw_i)c =-\sum_{i=1}^n (X_i^2Y_i + Y_i^3)w_i $$
$$ (\sum_{i=1}^nX_iw_i)a + (\sum_{i=1}^nY_iw_i)b + (\sum_{i=1}^nw_i)c = -\sum_{i=1}^n (X_i^2 + Y_i^2)w_i$$
用矩阵来表示
$$\begin{bmatrix}\sum_{i=1}^nX_i^2w_i && \sum_{i=1}^nX_iY_iw_i && \sum_{i=1}^nX_iw_i \\sum_{i=1}^nX_iY_iw_i &&\sum_{i=1}^nY_i^2w_i &&\sum_{i=1}^nY_iw_i \\sum_{i=1}^nX_iw_i &&\sum_{i=1}^nY_iw_i &&\sum_{i=1}^nw_i\end{bmatrix} \begin{bmatrix} a \b \c\end{bmatrix} = \begin{bmatrix} -\sum_{i=1}^n (X_i^3 + Y_i^2X_i)w_i \-\sum_{i=1}^n (X_i^2Y_i + Y_i^3)w_i \-\sum_{i=1}^n (X_i^2 + Y_i^2)w_i \end{bmatrix}$$
编码实现
思路: (1)根据样本集$(X_i,Y_i) i \epsilon(1,2,3…N)$以及对应的权重系数求出
$$\begin{bmatrix}\sum_{i=1}^nX_i^2w_i && \sum_{i=1}^nX_iY_iw_i && \sum_{i=1}^nX_iw_i \\sum_{i=1}^nX_iY_iw_i &&\sum_{i=1}^nY_i^2w_i &&\sum_{i=1}^nY_iw_i \\sum_{i=1}^nX_iw_i &&\sum_{i=1}^nY_iw_i &&\sum_{i=1}^nw_i\end{bmatrix} $$
以及
$$\begin{bmatrix} -\sum_{i=1}^n (X_i^3 + Y_i^2X_i)w_i \-\sum_{i=1}^n (X_i^2Y_i + Y_i^3)w_i \-\sum_{i=1}^n (X_i^2 + Y_i^2)w_i \end{bmatrix}$$
两个矩阵
(2)使用OpenCV函数cv::solve()求解
$$\begin{bmatrix} a \b \c\end{bmatrix}$$
|
|
References
本文由芒果浩明发布,转载请注明出处。 本文链接:https://blog.mangoeffect.net/opencv/least-square-circle-fit.html