1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
|
/**
* @file main.cpp
* @author your name ([email protected])
* @brief
* @version 0.1
* @date 2021-10-25
*
* @copyright Copyright (c) 2021
*
*/
#include "opencv2/opencv.hpp"
#include "opencv2/core/simd_intrinsics.hpp"
#include <omp.h>
#include "matplotlibcpp.h"
namespace plt = matplotlibcpp;
/**
* @brief 原始卷积
*
* @param image
* @param kernel_size
*/
void Origin(const cv::Mat image, cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss_mat = cv::getGaussianKernel(kernel_size, 0, CV_32F);
cv::Mat gauss_kernel = cv::Mat(kernel_size, kernel_size, CV_32F);
for (size_t i = 0; i < kernel_size; i++)
{
for (size_t j = 0; j < kernel_size; j++)
{
float val = gauss_mat.at<float>(i, 0) * gauss_mat.at<float>(j, 0);
gauss_kernel.at<float>(i, j) = val;
}
}
size_t rows = image.rows;
size_t cols = image.cols;
size_t half_kernel_size = kernel_size / 2;
for (size_t i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (size_t j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (size_t m = 0; m < kernel_size; m++)
{
for (size_t n = 0; n < kernel_size; n++)
{
int r = i + m - half_kernel_size;
int c = j + n - half_kernel_size;
float val = image.at<uchar>(r, c);
conv += (val * gauss_kernel.at<float>(m,n));
}
}
*dst.ptr<uchar>(i, j) = static_cast<uchar>(conv);
}
}
}
/**
* @brief 分离卷积核
*
* @param image
* @param kernel_size
*/
void SeparateKernel(const cv::Mat image,cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss_mat = cv::getGaussianKernel(kernel_size, 0, CV_32F);
std::vector<float> gauss_kernel(kernel_size);
for (size_t i = 0; i < kernel_size; i++)
{
gauss_kernel[i] = gauss_mat.at<float>(i, 0);
}
int half_kernel_size = kernel_size / 2;
int rows = image.rows;
int cols = image.cols;
//水平卷积
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n, 行不动,移动列
//conv += (image.at<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
conv += (*image.ptr<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = static_cast<uchar>(conv);
}
}
//竖直卷积
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int m = - half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m。列不动,移动行
conv += (*dst.ptr<uchar>(i + m, j) * gauss_kernel[m + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = static_cast<uchar>(conv);
}
}
}
/**
* @brief 分离卷积核+OpenMP并行
*
* @param image
* @param kernel_size
*/
void SeparateKernelOpenMP(const cv::Mat image, cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss_mat = cv::getGaussianKernel(kernel_size, 0, CV_32F);
std::vector<float> gauss_kernel(kernel_size);
for (size_t i = 0; i < kernel_size; i++)
{
gauss_kernel[i] = gauss_mat.at<float>(i, 0);
}
int half_kernel_size = kernel_size / 2;
int rows = image.rows;
int cols = image.cols;
//水平卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n, 行不动,移动列
//conv += (image.at<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
conv += (*image.ptr<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = conv;
}
}
//竖直卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m。列不动,移动行
conv += (*dst.ptr<uchar>(i + m, j) * gauss_kernel[m + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
}
/**
* @brief 分离卷积核+Simd
*
* @param image
* @param kernel_size
*/
void SeparateKernelSimd(const cv::Mat image, cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss = cv::getGaussianKernel(kernel_size, 0, CV_32F);
std::vector<float> gauss_kernel(kernel_size);
for (int i = 0; i < kernel_size; i++)
{
gauss_kernel[i] = gauss.at<float>(i, 0);
}
int rows = image.rows;
int cols = image.cols;
int half_kernel_size = kernel_size / 2;
//水平卷积
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32()};
std::array<cv::v_uint32x4, 4> v_ijn_arr{cv::v_setzero_u32(),cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32()};
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n,行不动,移动列
cv::v_uint8x16 vijn = cv::v_load(image.ptr<uchar>(i, j + n));
cv::v_uint16x8 b1, b2;
cv::v_expand(vijn, b1, b2);
cv::v_expand(b1, v_ijn_arr[0], v_ijn_arr[1]);
cv::v_expand(b2, v_ijn_arr[2], v_ijn_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[n + half_kernel_size]);
v_conv[0] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[0])) * v_gauss_factor);
v_conv[1] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[1])) * v_gauss_factor);
v_conv[2] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[2])) * v_gauss_factor);
v_conv[3] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[3])) * v_gauss_factor);
}
std::array<cv::v_uint16x8, 2> v_conv16{cv::v_setzero_u16(),cv::v_setzero_u16()};
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
//处理剩余像素点
int current_j = (cols - kernel_size) - (cols - kernel_size) % 16;
for (int j = current_j; j < cols - half_kernel_size; j ++)
{
float conv = 0.0f;
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n
conv += (*image.ptr<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
//竖直卷积
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{ cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32() };
std::array<cv::v_uint32x4, 4> v_imj_arr{cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32()};
for (int m = - half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m, 列不动,移动行
cv::v_uint8x16 v_uint8 = cv::v_load(dst.ptr<uchar>(i + m, j));
cv::v_uint16x8 b1, b2;
cv::v_expand(v_uint8, b1, b2);
cv::v_expand(b1, v_imj_arr[0], v_imj_arr[1]);
cv::v_expand(b2, v_imj_arr[2], v_imj_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[m + half_kernel_size]);
v_conv[0] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[0])) * v_gauss_factor;
v_conv[1] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[1])) * v_gauss_factor;
v_conv[2] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[2])) * v_gauss_factor;
v_conv[3] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[3])) * v_gauss_factor;
}
std::array<cv::v_uint16x8, 2> v_conv16{ cv::v_setzero_u16(),cv::v_setzero_u16() };
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m
conv += (*dst.ptr<uchar>(i + m, j) * gauss_kernel[m + half_kernel_size]);
}
*dst.ptr<uchar>(i,j) = uchar(conv);
}
}
}
/**
* @brief 分离卷积核+Simd+OpenMP
*
* @param image
* @param kernel_size
*/
void SeparateKernelSimdOpenMP(const cv::Mat image, cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss = cv::getGaussianKernel(kernel_size, 0, CV_32F);
std::vector<float> gauss_kernel(kernel_size);
for (int i = 0; i < kernel_size; i++)
{
gauss_kernel[i] = gauss.at<float>(i, 0);
}
int rows = image.rows;
int cols = image.cols;
int half_kernel_size = kernel_size / 2;
//水平卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{ cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32() };
std::array<cv::v_uint32x4, 4> v_ijn_arr{ cv::v_setzero_u32(),cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32() };
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n,行不动,移动列
cv::v_uint8x16 vijn = cv::v_load(image.ptr<uchar>(i, j + n));
cv::v_uint16x8 b1, b2;
cv::v_expand(vijn, b1, b2);
cv::v_expand(b1, v_ijn_arr[0], v_ijn_arr[1]);
cv::v_expand(b2, v_ijn_arr[2], v_ijn_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[n + half_kernel_size]);
v_conv[0] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[0])) * v_gauss_factor);
v_conv[1] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[1])) * v_gauss_factor);
v_conv[2] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[2])) * v_gauss_factor);
v_conv[3] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[3])) * v_gauss_factor);
}
std::array<cv::v_uint16x8, 2> v_conv16{ cv::v_setzero_u16(),cv::v_setzero_u16() };
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
//处理剩余像素点
int current_j = (cols - kernel_size) - (cols - kernel_size) % 16;
for (int j = current_j; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n
conv += (*image.ptr<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
//竖直卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{ cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32() };
std::array<cv::v_uint32x4, 4> v_imj_arr{ cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32() };
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m, 列不动,移动行
cv::v_uint8x16 v_uint8 = cv::v_load(dst.ptr<uchar>(i + m, j));
cv::v_uint16x8 b1, b2;
cv::v_expand(v_uint8, b1, b2);
cv::v_expand(b1, v_imj_arr[0], v_imj_arr[1]);
cv::v_expand(b2, v_imj_arr[2], v_imj_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[m + half_kernel_size]);
v_conv[0] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[0])) * v_gauss_factor;
v_conv[1] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[1])) * v_gauss_factor;
v_conv[2] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[2])) * v_gauss_factor;
v_conv[3] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[3])) * v_gauss_factor;
}
std::array<cv::v_uint16x8, 2> v_conv16{ cv::v_setzero_u16(),cv::v_setzero_u16() };
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m
conv += (*dst.ptr<uchar>(i + m, j) * gauss_kernel[m + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
}
/**
* @brief 分离卷积核+Simd+OpenMP
*
* @param image
* @param kernel_size
*/
void SeparateKernelSimdOpenMP256(const cv::Mat image, cv::Mat& dst, const size_t kernel_size)
{
cv::Mat gauss = cv::getGaussianKernel(kernel_size, 0, CV_32F);
std::vector<float> gauss_kernel(kernel_size);
for (int i = 0; i < kernel_size; i++)
{
gauss_kernel[i] = gauss.at<float>(i, 0);
}
int rows = image.rows;
int cols = image.cols;
int half_kernel_size = kernel_size / 2;
//水平卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{ cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32() };
std::array<cv::v_uint32x4, 4> v_ijn_arr{ cv::v_setzero_u32(),cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32() };
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n,行不动,移动列
cv::v_uint8x16 vijn = cv::v_load(image.ptr<uchar>(i, j + n));
cv::v_uint16x8 b1, b2;
cv::v_expand(vijn, b1, b2);
cv::v_expand(b1, v_ijn_arr[0], v_ijn_arr[1]);
cv::v_expand(b2, v_ijn_arr[2], v_ijn_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[n + half_kernel_size]);
v_conv[0] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[0])) * v_gauss_factor);
v_conv[1] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[1])) * v_gauss_factor);
v_conv[2] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[2])) * v_gauss_factor);
v_conv[3] += (cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_ijn_arr[3])) * v_gauss_factor);
}
std::array<cv::v_uint16x8, 2> v_conv16{ cv::v_setzero_u16(),cv::v_setzero_u16() };
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
//处理剩余像素点
int current_j = (cols - kernel_size) - (cols - kernel_size) % 16;
for (int j = current_j; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int n = -half_kernel_size; n < half_kernel_size; n++)
{
//I(i + m, i + n) * g(n), m固定,遍历n
conv += (*image.ptr<uchar>(i, j + n) * gauss_kernel[n + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
//竖直卷积
#pragma omp parallel for
for (int i = half_kernel_size; i < rows - half_kernel_size; i++)
{
for (int j = half_kernel_size; j < cols - half_kernel_size; j += 16)
{
std::array<cv::v_float32x4, 4> v_conv{ cv::v_setzero_f32(),cv::v_setzero_f32(), cv::v_setzero_f32(), cv::v_setzero_f32() };
std::array<cv::v_uint32x4, 4> v_imj_arr{ cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32(), cv::v_setzero_u32() };
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m, 列不动,移动行
cv::v_uint8x16 v_uint8 = cv::v_load(dst.ptr<uchar>(i + m, j));
cv::v_uint16x8 b1, b2;
cv::v_expand(v_uint8, b1, b2);
cv::v_expand(b1, v_imj_arr[0], v_imj_arr[1]);
cv::v_expand(b2, v_imj_arr[2], v_imj_arr[3]);
cv::v_float32x4 v_gauss_factor = cv::v_setall_f32(gauss_kernel[m + half_kernel_size]);
v_conv[0] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[0])) * v_gauss_factor;
v_conv[1] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[1])) * v_gauss_factor;
v_conv[2] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[2])) * v_gauss_factor;
v_conv[3] += cv::v_cvt_f32(cv::v_reinterpret_as_s32(v_imj_arr[3])) * v_gauss_factor;
}
std::array<cv::v_uint16x8, 2> v_conv16{ cv::v_setzero_u16(),cv::v_setzero_u16() };
v_conv16[0] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[0]), cv::v_round(v_conv[1])));
v_conv16[1] = cv::v_abs(cv::v_pack(cv::v_round(v_conv[2]), cv::v_round(v_conv[3])));
cv::v_uint8x16 v_conv_uint8 = cv::v_pack(v_conv16[0], v_conv16[1]);
cv::v_store(dst.ptr<uchar>(i, j), v_conv_uint8);
}
for (int j = half_kernel_size; j < cols - half_kernel_size; j++)
{
float conv = 0.0f;
for (int m = -half_kernel_size; m < half_kernel_size; m++)
{
//I(i + m, i + n) * g(n), n固定,遍历m
conv += (*dst.ptr<uchar>(i + m, j) * gauss_kernel[m + half_kernel_size]);
}
*dst.ptr<uchar>(i, j) = uchar(conv);
}
}
}
int main(int argc, char** argv)
{
std::vector<double> x;
std::vector<double> origin_y;
std::vector<double> opencv_y;
std::vector<double> separate_y;
std::vector<double> separate_simd_y;
std::vector<double> separate_openmp_y;
std::vector<double> separate_simd_openmp_y;
for (int h = 2; h < 20; h++)
{
size_t height = 100 * h;
x.push_back(height);
size_t width = height * (4.0 / 3.0);
cv::Mat source = cv::Mat(cv::Size(width, height), CV_8UC1, cv::Scalar::all(100));
cv::RNG rng;
rng.fill(source, cv::RNG::NORMAL, 100, 20);
cv::Mat separate_result = source.clone();
cv::Mat orgin_result = source.clone();
cv::Mat simd_result = source.clone();
cv::Mat separate_omp_result = source.clone();
cv::Mat separate_simd_omp_result = source.clone();
cv::Mat opencv_result = source.clone();
auto t0 = std::chrono::system_clock::now();
cv::GaussianBlur(source, opencv_result, cv::Size(7, 7), 0.0, 0.0);
auto t1 = std::chrono::system_clock::now();
SeparateKernel(source, separate_result, 7);
auto t2 = std::chrono::system_clock::now();
SeparateKernelSimd(source, simd_result, 7);
auto t3 = std::chrono::system_clock::now();
SeparateKernelOpenMP(source, separate_omp_result, 7);
auto t4 = std::chrono::system_clock::now();
SeparateKernelSimdOpenMP(source, separate_simd_omp_result, 7);
auto t5 = std::chrono::system_clock::now();
Origin(source, orgin_result, 7);
auto t6 = std::chrono::system_clock::now();
opencv_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t1 - t0).count());
separate_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t2 - t1).count());
separate_simd_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t3 - t2).count());
separate_openmp_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t4 - t3).count());
separate_simd_openmp_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t5 - t4).count());
origin_y.push_back(std::chrono::duration_cast<std::chrono::milliseconds>(t6 - t5).count());
}
std::map<std::string, std::string> origin_result;
std::map<std::string, std::string> opencv_result;
std::map<std::string, std::string> separate_result;
std::map<std::string, std::string> simd_result;
std::map<std::string, std::string> openmp_result;
std::map<std::string, std::string> simd_openmp_result;
origin_result.insert(std::pair<std::string, std::string>("color", "red"));
origin_result.insert(std::pair<std::string, std::string>("label", "none-optimization"));
opencv_result.insert(std::pair<std::string, std::string>("color", "purple"));
opencv_result.insert(std::pair<std::string, std::string>("label", "opencv(with tbb)"));
separate_result.insert(std::pair<std::string, std::string>("color", "yellow"));
separate_result.insert(std::pair<std::string, std::string>("label", "separate"));
simd_result.insert(std::pair<std::string, std::string>("color", "green"));
simd_result.insert(std::pair<std::string, std::string>("label", "separate+simd"));
openmp_result.insert(std::pair<std::string, std::string>("color", "blue"));
openmp_result.insert(std::pair<std::string, std::string>("label", "separate+openmp"));
simd_openmp_result.insert(std::pair<std::string, std::string>("color", "black"));
simd_openmp_result.insert(std::pair<std::string, std::string>("label", "separate+simd+openmp"));
plt::plot(x, opencv_y, opencv_result);
plt::plot(x, origin_y, origin_result);
plt::plot(x, separate_y, separate_result);
plt::plot(x, separate_simd_y, simd_result);
plt::plot(x, separate_openmp_y, openmp_result);
plt::plot(x, separate_simd_openmp_y, simd_openmp_result);
plt::xlabel("image size");
plt::ylabel("cost time:ms");
plt::legend();
plt::title("Gaussian blur performance");
plt::show();
return 0;
}
|
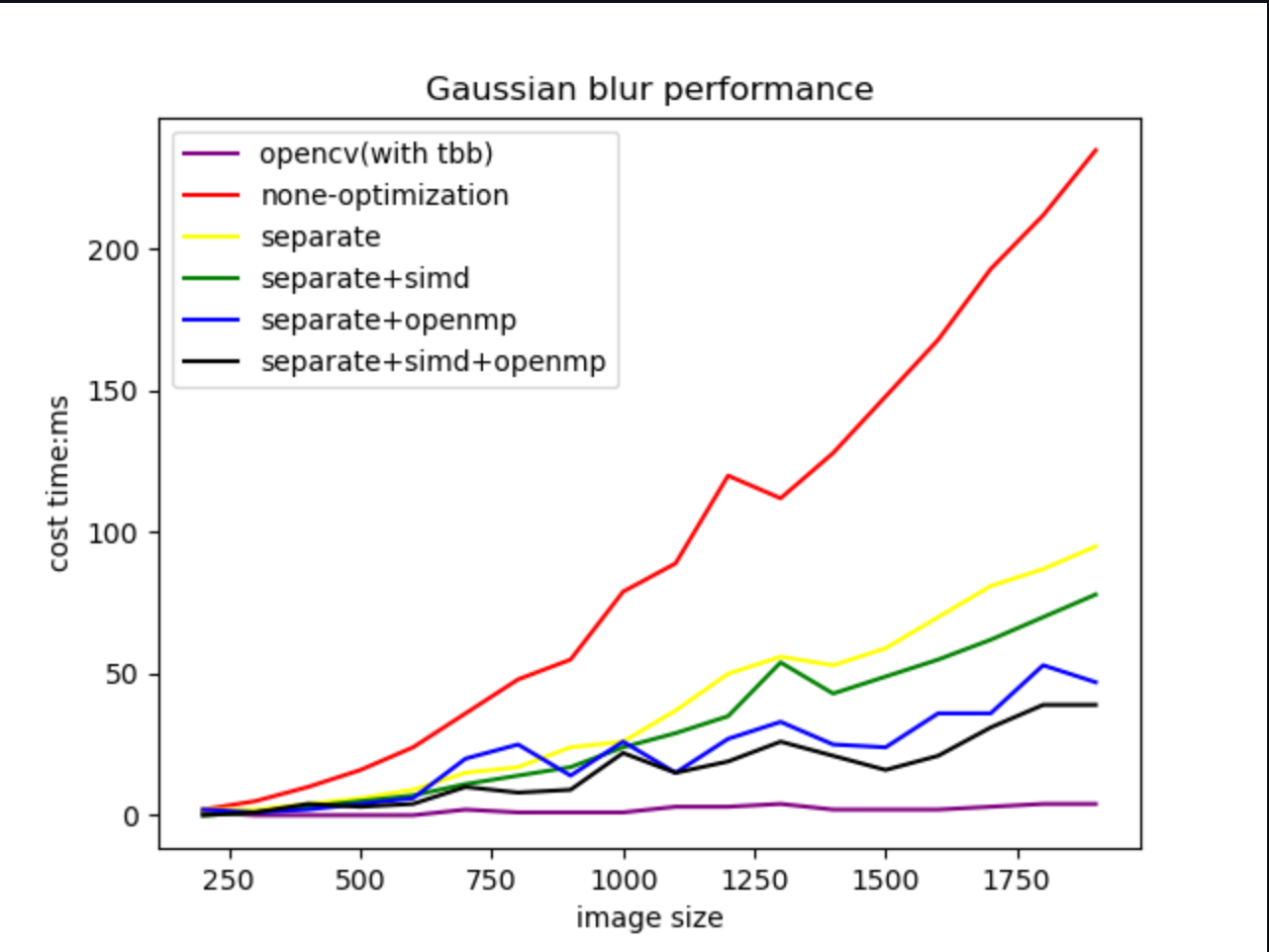 可以看到,原始卷积代码随着图像的尺寸增加计算耗时增加非常快,而使用卷积核分离优化后相比原来结果拥有大幅度的下降。在分离卷积核基础上,分别加入simd与OpenMP并行优化后也继续提高了计算效率,相对来说分离OpenMP比Simd加速更明显一些。而在结合了分离卷积核、simd与OpenMP优化后,计算效率继续提高,相比原始未作优化程序已经得到了非常可观的优化提升。但是在对比OpenCV的实现时,仍有提升空间。原因大概使用了OpenCV的最新4.5.4版本,并加入了tbb依赖编译。OpenCV优化卷积时也使用了分离卷积核与simd等并行技术,相比之下我感觉我的simd实现并不是非常完美,类型转换太多处理不是很好,加上tbb在多线程优化上相比OpenMP有着更大的发挥空间。待后续研究看看能否继续提高超过OpenCV优化。
可以看到,原始卷积代码随着图像的尺寸增加计算耗时增加非常快,而使用卷积核分离优化后相比原来结果拥有大幅度的下降。在分离卷积核基础上,分别加入simd与OpenMP并行优化后也继续提高了计算效率,相对来说分离OpenMP比Simd加速更明显一些。而在结合了分离卷积核、simd与OpenMP优化后,计算效率继续提高,相比原始未作优化程序已经得到了非常可观的优化提升。但是在对比OpenCV的实现时,仍有提升空间。原因大概使用了OpenCV的最新4.5.4版本,并加入了tbb依赖编译。OpenCV优化卷积时也使用了分离卷积核与simd等并行技术,相比之下我感觉我的simd实现并不是非常完美,类型转换太多处理不是很好,加上tbb在多线程优化上相比OpenMP有着更大的发挥空间。待后续研究看看能否继续提高超过OpenCV优化。