PCL库实现了多种点云的滤波方法,直通滤波(passthrough filter)为众多滤波方法里面比较基础简单的滤波方法。直通滤波原理非常简单,顾名思义也能猜出其滤波的方法流程,“直通"即基于点云空间坐标系设定一个通道,将点云在通道范围之外的点剔除滤掉从而保留通道里边的点云。这个"通道"在PCL里面具体表现为针对某个坐标轴设定的限定范围,比如:
1
2
|
setFilterFieldName("z");
setFilterLimits(0.0f, 1.0f);
|
以上滤波只保留点云z轴范围在[0.0, 1.0]之内的点云
而
1
2
|
setFilterFieldName("x");
setFilterLimits(-2.0f, 3.0f);
|
则滤波只保留点云x轴范围在[-2.0, 3.0]之内的点云。其原理非常简单,下面直接贴出使用示例代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
|
#include <iostream>
#include <random>
#include "pcl/point_types.h"
#include "pcl/filters/passthrough.h"
#include "pcl/visualization/pcl_visualizer.h"
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_removed(new pcl::PointCloud<pcl::PointXYZ>);
//step1: 创建点云数据
std::random_device rd;
std::default_random_engine random(rd());
std::uniform_real_distribution<float> dis(0.0f, 3.0f);
for(int i = 0; i < 3000; ++i)
{
float x = dis(random);
float y = dis(random);
float z = dis(random);
cloud->points.push_back({x, y, z});
}
//step2: 创建直通滤波对象
pcl::PassThrough<pcl::PointXYZ> pass_through_filter;
//step3: 设置直通滤波参数
pass_through_filter.setInputCloud(cloud);
pass_through_filter.setFilterFieldName("z");
pass_through_filter.setFilterLimits(0.0f, 1.0f);
//step4: 执行滤波处理
pass_through_filter.filter(*cloud_filtered);
//step5: 可视化滤波结果
pass_through_filter.setFilterLimits(1.0f, 3.0f);//重新滤波,提取第一次滤波剔除的部分点云
pass_through_filter.filter(*cloud_removed);
pcl::visualization::PCLVisualizer viewer("pcl pass throuhg filter");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_handler(cloud_removed, 255, 0, 0);
viewer.addPointCloud(cloud_removed, cloud_handler, "cloud_removed");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> filtered_handler(cloud_filtered , 0, 255, 0);
viewer.addPointCloud(cloud_filtered, filtered_handler, "cloud_filtered");
viewer.addCoordinateSystem(1);
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
viewer.close();
return 0;
}
|
执行程序的结果如图
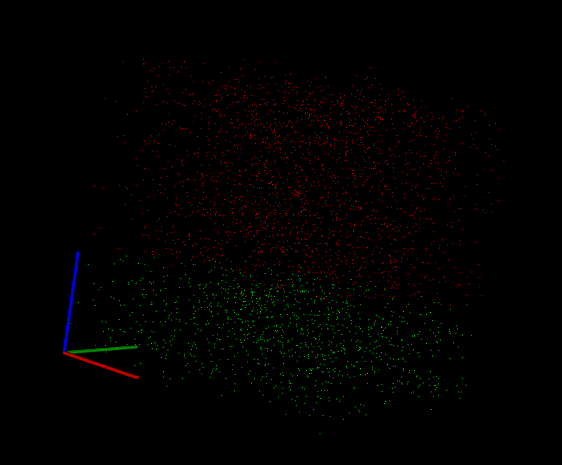 坐标轴xyz顺序是rgb颜色排序的,从蓝色z轴划分,绿色为第一遍[0,1]的滤波结果,红色则是为[1, 3]滤波结果
坐标轴xyz顺序是rgb颜色排序的,从蓝色z轴划分,绿色为第一遍[0,1]的滤波结果,红色则是为[1, 3]滤波结果
若是想要保留通道之外的点云,不想要限定坐标轴之内的点云,PCL提供了一整个设置取反的参数,只需要在滤波之前添加一行代码即可
1
|
pass_through_filter.setFilterLimitsNegative(false);
|
取反测试示例完整代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
|
#include <iostream>
#include <random>
#include "pcl/point_types.h"
#include "pcl/filters/passthrough.h"
#include "pcl/visualization/pcl_visualizer.h"
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_removed(new pcl::PointCloud<pcl::PointXYZ>);
//step1: 创建点云数据
std::random_device rd;
std::default_random_engine random(rd());
std::uniform_real_distribution<float> dis(0.0f, 3.0f);
for(int i = 0; i < 3000; ++i)
{
float x = dis(random);
float y = dis(random);
float z = dis(random);
cloud->points.push_back({x, y, z});
}
//step2: 创建直通滤波对象
pcl::PassThrough<pcl::PointXYZ> pass_through_filter;
//step3: 设置直通滤波参数
pass_through_filter.setInputCloud(cloud);
//设置取反标志
pass_through_filter.setFilterLimitsNegative(true);
pass_through_filter.setFilterFieldName("z");
pass_through_filter.setFilterLimits(0.0f, 1.0f);
//step4: 执行滤波处理
pass_through_filter.filter(*cloud_filtered);
//step5: 可视化滤波结果
pass_through_filter.setFilterLimits(1.0f, 3.0f);//重新滤波,提取第一次滤波剔除的部分点云
pass_through_filter.filter(*cloud_removed);
pcl::visualization::PCLVisualizer viewer("pcl pass throuhg filter");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_handler(cloud_removed, 255, 0, 0);
viewer.addPointCloud(cloud_removed, cloud_handler, "cloud_removed");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> filtered_handler(cloud_filtered , 0, 255, 0);
viewer.addPointCloud(cloud_filtered, filtered_handler, "cloud_filtered");
viewer.addCoordinateSystem(1);
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
viewer.close();
return 0;
}
|
执行代码结果如下
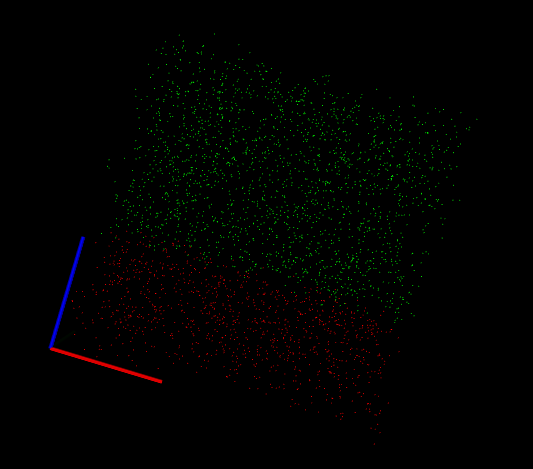 可以看到与先前滤波相比,红蓝点云位置置反了。
可以看到与先前滤波相比,红蓝点云位置置反了。
本文由芒果浩明发布,转载请注明出处。
本文链接:https://blog.mangoeffect.net/algorithm/passthrough-filter-of-pcl.html