1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
|
#include <iostream>
#include <random>
#include "pcl/point_types.h"
#include "pcl/filters/conditional_removal.h"
#include "pcl/visualization/pcl_visualizer.h"
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_removed(new pcl::PointCloud<pcl::PointXYZ>);
//step1: 创建点云数据
std::random_device rd;
std::default_random_engine random(rd());
std::uniform_real_distribution<float> dis(0.0f, 3.0f);
for (int i = 0; i < 3000; ++i)
{
float x = dis(random);
float y = dis(random);
float z = dis(random);
cloud->points.push_back({ x, y, z });
}
//step2: 创建条件滤波对象
pcl::ConditionalRemoval<pcl::PointXYZ> conditional_removal;
//step3: 设置条件滤波参数
//条件与
//保留点云xyz坐标都在[1,2]之内的点
pcl::ConditionAnd<pcl::PointXYZ>::Ptr condition_add(new pcl::ConditionAnd<pcl::PointXYZ>());
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GE, 1.0)));
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LE, 2.0)));
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("y", pcl::ComparisonOps::GE, 1.0)));
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("y", pcl::ComparisonOps::LE, 2.0)));
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("x", pcl::ComparisonOps::GE, 1.0)));
condition_add->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("x", pcl::ComparisonOps::LE, 2.0)));
//条件或
pcl::ConditionOr<pcl::PointXYZ>::Ptr condition_or(new pcl::ConditionOr<pcl::PointXYZ>());
condition_or->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GE, 2)));
condition_or->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("x", pcl::ComparisonOps::GE, 1.5)));
//condition_add->addCondition(condition_or);
condition_or->addCondition(condition_add);
conditional_removal.setCondition(condition_or);
conditional_removal.setInputCloud(cloud);
//step4: 执行滤波处理
conditional_removal.filter(*cloud_filtered);
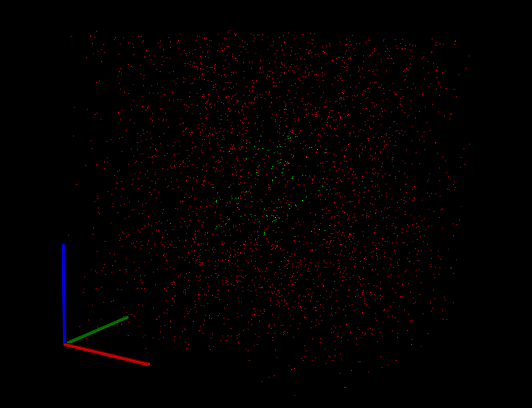
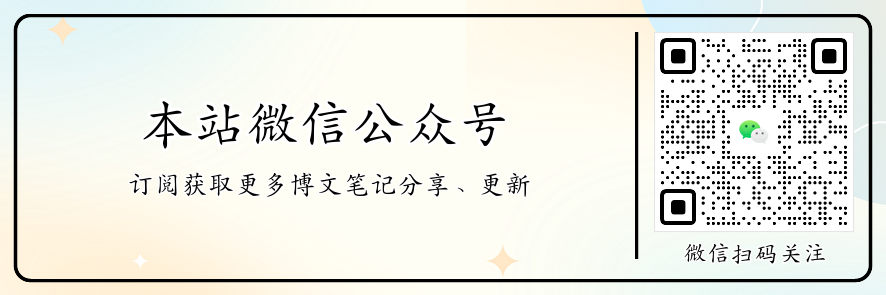
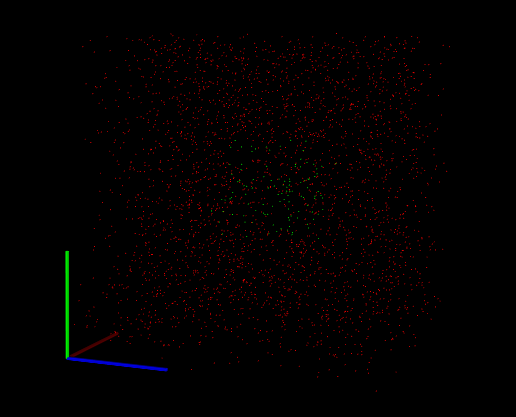
//step5: 可视化滤波结果
pcl::visualization::PCLVisualizer viewer("pcl condition removal filter");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_handler(cloud, 255, 0, 0);
viewer.addPointCloud(cloud, cloud_handler, "cloud");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> filtered_handler(cloud_filtered, 0, 255, 0);
viewer.addPointCloud(cloud_filtered, filtered_handler, "cloud_filtered");
viewer.addCoordinateSystem(1);
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
viewer.close();
return 0;
}
|
 也可以将ConditionAnd合并到ConditionOr后设置ConditionOr,反过来也可以将ConditionOr合并到ConditionAnd后设置ConditionAnd,但需要注意的是添加的顺序不一样,组合成的条件结果是不一样的,这个与编程里边&&、||逻辑与或的短路原理是一样的。
也可以将ConditionAnd合并到ConditionOr后设置ConditionOr,反过来也可以将ConditionOr合并到ConditionAnd后设置ConditionAnd,但需要注意的是添加的顺序不一样,组合成的条件结果是不一样的,这个与编程里边&&、||逻辑与或的短路原理是一样的。